为什么需要内存分配器?
总说周知,内存作为一种相对稀缺的资源,在操作系统中以虚拟内存的形式来作为一种内存抽象提供给进程,这里可以简单地把它看做一个连续的地址集合{0, 1, 2, ..., M},由栈空间、堆空间、代码片、数据片等地址空间段组合而成,如下图所示(出自CS:APP3e, Bryant and O’Hallaron的第9章第9节)
这里我们重点关注Heap(堆),堆是一块动态的虚拟内存地址空间。在C语言中,我们通常使用malloc来申请内存以及使用free来释放内存,也许你想问,这样不就足够了吗?但是,这种手动的内存管理会带来很多问题,比如:
- 给程序员带来额外的心智负担,必须得及时释放掉不再使用的内存空间,否则就很容易出现内存泄露
- 随着内存的不断申请与释放,会产生大量的内存碎片,这将大大降低内存的利用率
因此,正确高效地管理内存空间是非常有必要的,常见的技术实现有Sequential allocation, Free-List allocation等。那么,在Go中,内存是如何被管理的呢?
注:此为Go1.13.6的实现逻辑,随版本更替某些细节会有些许不同
实现原理
Go的内存分配器是基于TCMalloc设计的,因此我建议你先行查阅,这将有利于理解接下来的内容。
大量工程经验证明,程序中的小对象占了绝大部分,且生命周期都较为短暂。因此,Go将内存划分为各种类别(Class),并各自形成Free-List。相较于单一的Free-List分配器,分类后主要有以下优点:
其一方面减少不必要的搜索时间,因为对象只需要在其所属类别的空闲链表中搜索即可
另一方面减少了内存碎片化,同一类别的空闲链表,每个对象分配的空间都是一样大小(不足则补齐),因此该链表除非无空闲空间,否则总能分配空间,避免了内存碎片
那么,Go内存分配器具体是如何实现的呢?接下来,我将以自顶向下的方式,从宏观到微观,层层拨开她的神秘面纱。
数据结构
首先,介绍Go内存分配中相关的数据结构。其总体概览图如下所示:
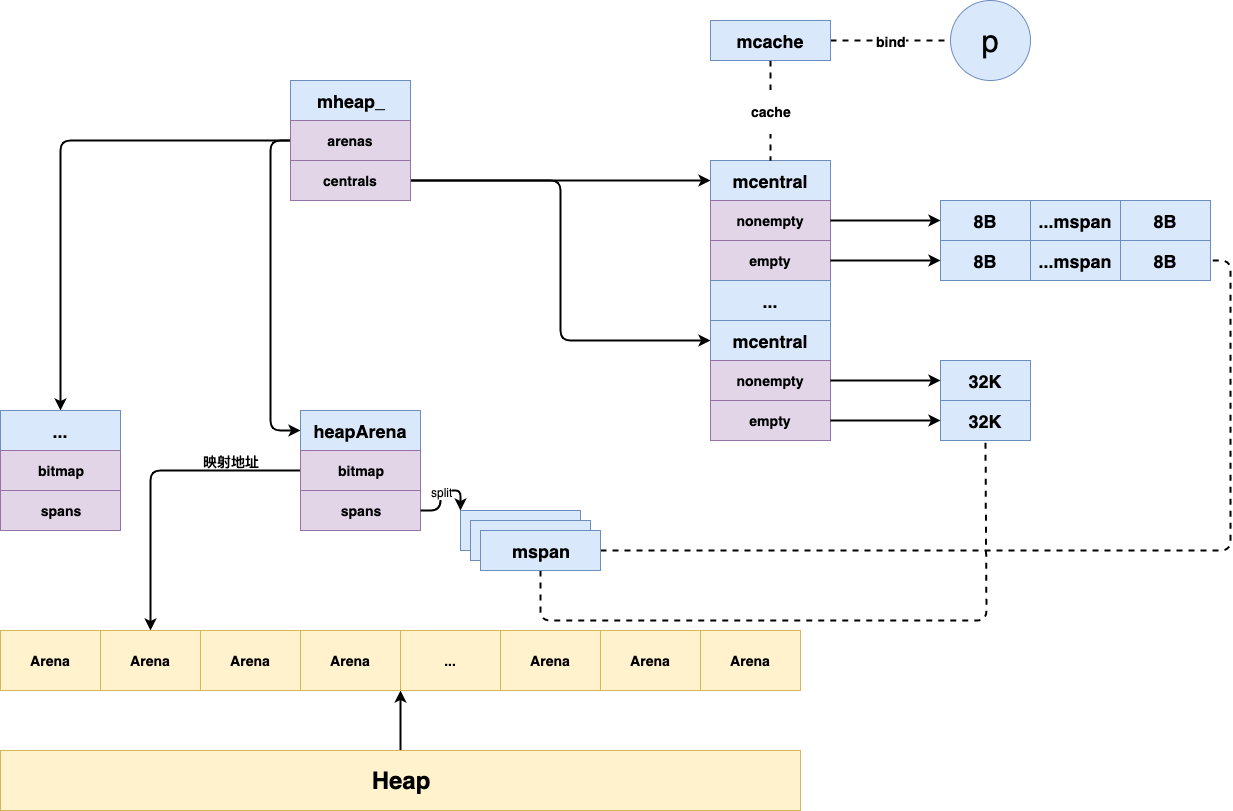
heapArena
在操作系统中,我们一般把堆看做是一块连续的虚拟内存空间。
Go将其划分为数个相同大小的连续空间块,称之arena,其中,heapArena则作为arena空间的管理单元,其结构如下所示:
type heapArena struct {
bitmap [heapArenaBitmapBytes]byte
spans [pagesPerArena]*mspan
...
}
- bitmap: 表示arena区域中的哪些地址保存了对象,哪些地址保存了指针
- spans: 表示arena区域中的哪些操作系统页(8K)属于哪些mspan
mheap
然后,则是核心角色mheap了,它是Go内存管理中的核心数据结构,作为全局唯一变量,其结构如下所示:
type mheap struct {
free mTreap
...
allspans []*mspan
...
arenas [1 << arenaL1Bits]*[1 << arenaL2Bits]*heapArena
...
central [numSpanClasses]struct {
mcentral mcentral
pad [cpu.CacheLinePadSize - unsafe.Sizeof(mcentral{})%cpu.CacheLinePadSize]byte
}
}
- free: 使用树堆的结构来保存各种类别的空闲mspan
- allspans: 用以记录了分配过了的mspan
- arenas: 表示其覆盖的所有arena区域,通过虚拟内存地址计算得到下标索引
- central: 表示其覆盖的所有mcentral,一共134个,对应67个类别
mcentral
而mcentral充当mspan的中心管理员,负责管理某一类别的mspan,其结构如下:
type mcentral struct {
lock mutex
spanclass spanClass
nonempty mSpanList
empty mSpanList
}
- lock: 全局互斥锁,因为多个线程会并发请求
- spanclass:mspan类别
- nonempty:mspan的双端链表,且其中至少有一个mspan包含空闲对象
- empty:mspan的双端链表,但不确定其中的mspan是否包含空闲对象
mcache
mcache充当mspan的线程本地缓存角色,其与线程处理器(P)一一绑定。
这样呢,当mcache有空闲mspan时,则无需向mcentral申请,因此可以避免诸多不必要的锁消耗。结构如下所示:
type mcache struct {
...
alloc [numSpanClasses]*mspan
...
}
- alloc: 表示各个类别的mspan
mspan
mspan作为虚拟内存的实际管理单元,管理着一片内存空间(npages个页),其结构如下所示:
type mspan struct {
next *mspan // 指向下一个mspan
prev *mspan // 指向前一个mspan
...
npages uintptr
freeindex uintptr
nelems uintptr // 总对象个数
...
allocBits *gcBits
gcmarkBits *gcBits
}
- next指针指向下一个mspan,prev指针指向前一个mspan,因此各个mspan彼此之间形成一个双端链表,并被runtime.mSpanList作为链表头。
- npages:mspan所管理的页的数量
- freeindex:空闲对象的起始位置,如果freeindex等于nelems时,则代表此mspan无空闲对象可分配了
- allocBits:标记哪些元素已分配,哪些未分配。与freeindex结合,可跳过已分配的对象
- gcmarkBits:标记哪些对象存活,每次GC结束时,将其设为allocBits
通过上述对Go内存管理中各个关键数据结构的介绍,想必现在,我们已经对其有了一个大概的轮廓。接下来,让我们继续探究,看看Go具体是如何利用这些数据结构来实现高效的内存分配算法
算法
分配内存
内存分配算法,其主要函数为runtime.mallocgc,其基本步骤简述如下:
- 判断待分配对象的大小
- 若对象小于maxTinySize(16B),且不为指针,则执行微对象分配算法
- 若对象小于maxSmallSize(32KB),则执行小对象分配算法
- 否则,则执行大对象分配算法
在微对象以及小对象分配过程中,如果span中找不到足够的空闲空间,Go会触发层级的内存分配申请策略。其基本步骤如下:
- 先从mcache寻找对应类别的span,若有空闲对象,则成功返回
- 若无,则向mcentral申请,分别从nonempty和empty中寻找匹配的span,若找到,则成功返回
- 若还未找到,则继续向mheap申请,从mheap.free中寻找,若找到,则成功返回
- 若未找到,则需扩容,从关联的arena中申请,若关联的arena中空间也不足,则向OS申请额外的arena
- 扩容完毕后,继续从mheap.free中寻找,若仍未找到,则抛出错误
学到了什么
- 本地线程缓存,提高性能:通过mcache缓存小对象的span,并优先在mcache中分配,降低锁竞争
- 无处不在的BitMap应用场景:通过二进制位来映射对象,例如mspan.allocBits用以表示对象是否分配
- 多级分配策略:自底向上,性能损耗:低->高,频率:高->低,能有效提高性能,思想上类似CPU中的多级缓存
总结
本文主要介绍了Go内存分配中的一些重要组件以及分配算法。可以看到,其主要思想还是基于TCMalloc的策略,将对象根据大小分类,并使用不同的分配策略。此外,还采用逐层的内存申请策略,大大提高内存分配的性能。
参考
- https://google.github.io/tcmalloc/
- http://goog-perftools.sourceforge.net/doc/tcmalloc.html
- https://medium.com/@ankur_anand/a-visual-guide-to-golang-memory-allocator-from-ground-up-e132258453ed
- https://www.cnblogs.com/zkweb/p/7880099.html
- https://www.cnblogs.com/luozhiyun/p/14349331.html
- https://draveness.me/golang/docs/part3-runtime/ch07-memory/golang-memory-allocator/